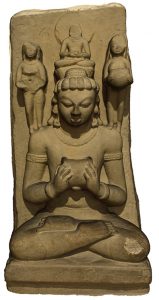
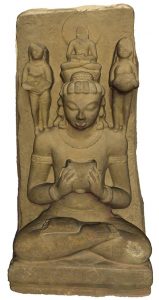
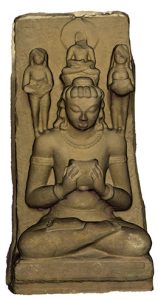
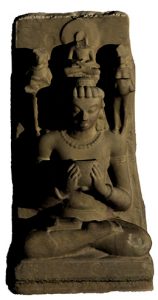
Един от често срещаните проблеми с 3D реконструкцията (понякога наричана фотограметрия) е, че обикновено се улавят не само геометрията и текстурата, но и условията на осветление.По-специално сенките са изпечени в текстурни карти.Те могат да бъдат особено трудни за премахване ръчно.По-долу са показани някои опити на новоиздадения софтуер за полуавтоматично премахване на тези светлинни ефекти.Получените изображения често изглеждат плоски, като такива са представени и някои примери за повторно осветени модели.
В каквато и директория да стартирате нова Tmux сесия, това е директорията, която ще се използва за всеки нов прозорец, който създавате.
Tmux е работният кон в моя работен процес за местно развитие. Когато вляза cd в директория и започна да работя извън Tmux сесия, имам чувството, че нещо липсва.
Винаги има нужда да получите нова обвивка, за да проверите нещо или да изпълните бърз тест.Отварям куп прозорци: някои постоянни (които обикновено наричам), повечето за еднократна употреба.
Проблемът
След като сесията стартира, „началната директория“ е зададена и фиксирана.
Ако по средата на сесия трябваше да се съсредоточа върху поддиректория или да се преместя другаде, имах няколко неоптимални избора:
изрично cd към новата директория, след отваряне на всеки нов прозорец
излезте от сесията и започнете нова в новата директория
започнете нова сесия, в друг терминал, в новата директория
Това се беше случвало достатъчно пъти, за да оправдае търсенето на по-добър начин…
Решението
Добавете това към вашия $HOME/.tmux.conf (ето моето):
Долната черта имаше смисъл за мен, но не се колебайте да персонализирате подвързването.
Опит
Възможността да „използвам повторно“ моите сесии беше много удобна.Не прекарвам твърде много време в мислене за „най-добрата“ директория, от която да започна сесия;винаги мога да го поправя по-късно.
Програмно осигуряване: MetashapePro
Написано от Пол Бурк/Paul Bourke
Юни 2019 г.
Въведение
Следващите документи упражнение за 3D реконструкция на 22 малки мъниста от черупки, използвани за оформяне на огърлица, хартията, описваща предметите, може да бъде намерена тук. Взетият подход е фотографски, често наричан фотограметрия, използва се програмно осигуряване MetaShape. Размерът на мънистата варираше от 4 мм до 20 мм.
Силно желана цел за фотографска реконструкция е рязкото фокусиране на изображенията и добрата дълбочина на фокусиране, но дълбочината на фокусиране е точно това, което човек няма при макро фотографията. Едно от решенията за това е да фокусирате стека, като комбинирате множество снимки, всяка с различен диапазон на дълбочина на фокуса. За този проект този подход беше изключен поради екстремните времена за улавяне, които биха изисквали, както и увеличеното време за постпродукция. Например, използваният подход за единична снимка на позиция отне средно 1 час на обект, подреждането на фокуса би удължило това поне с коефициент 4. Постпроизводството ще изисква допълнителна стъпка, въпреки че може да бъде до голяма степен автоматизирано.
Съоръжение за камера
Първоначалната платформа на камерата се състоеше от обекта, монтиран на пластмасов блок, 100-милиметров макро обектив Canon и линеен макро плъзгач.
Първоначална тестова камера е настроена
Докато това беше функционално за по-големи обекти (15 мм до 20 мм на сензора с пълна рамка), той страдаше от редица проблеми: линейната макро релса включваше грубо и отнемащо време ляво/дясно подравняване с помощта на контролите за глава на статив, а макро обективът от 100 мм евсе още в най-добрия случай 1:1 обектив, така че не е идеален за по-малки обекти с или под 10 мм, където обикновено ще се използва по-малко от 1/4 от сензора.
Крайното решение включваше двуосова макро релса, лява и дясна за подравняване и напред-назад за фокусиране.Крайният обектив беше 65-милиметрова макроскопия на Canon с увеличение между 1:1 и 5:1, въпреки че за тези обекти всъщност беше използвано не повече от 3: 1 увеличение.
Canon MP-E 65 мм обектив
Има алтернативи на закупуването на относително необичайни лещи с увеличение 5:1, например подходът на обратната леща.
Окончателна настройка на камерата
Тъй като е необходим пълен 3D модел, обектите са снимани в две ориентации с обикновено поне 30% припокриване.Формата на всеки обект варира и за всеки тип форма са използвани различни монтажи.Критично е, разбира се, обектът да не се движи по време на сканиране, въпреки че може да се толерира движение, предизвикано от малки вибрации, тъй като то съответства на смяна на камерата или наклон.
Използвана е светлинна кутия, за да даде и по-високи нива на светлина, за да може да се постигне малка бленда (увеличена дълбочина на фокусиране).Той също така премахва светлинните ефекти върху самите обекти, позволявайки максимална възможност за осветяване в презентациите.
Типично изображение и размер на сензора
Улавяне
За увеличение 1:1 и 2:1 е имало достатъчно припокриване във фокусни области и следователно достатъчно припокриване на точката на характеристиките, като се правят стъпки от 20 градуса по дължина и се извършват четири 360 пръстена по географска ширина.Тъй като обхватът на географската ширина обикновено е от 0 (екватор) до 80 градуса, това е и размер на стъпка от 20 градуса по географска ширина.В много случаи за най-висока географска ширина са били необходими само стъпки от 30 градуса за достатъчно припокриване.Следователно за всяко половин сканиране са необходими или 66, или 72 снимки.Камерата беше Canon 5D Mk III (пълен кадър).
Автоматичното въртене е постигнато с ротационен блок Edelkrone Head One.
Edelkrone Head One ротатор
Софтуерен интерфейс Edelkrone Head One
В светлинната кутия имаше достатъчно светлина за максималната бленда f16, като същевременно се поддържаше разумна ISO 200 и 1/20 скорост на затвора.На всеки кадър беше взето решение за региона, върху който да се фокусира, обикновено поради формата на обекта, това беше най-близката повърхност до камерата.Макро релсата е използвана за фокусиране, тъй като този обектив няма възможност за автоматично фокусиране.Дори и с автоматичен фокус, макрообективите обикновено имат значително фокусирано дишане, което променя фокусното разстояние за всеки кадър, което не е добра идея за алгоритмите за 3D възстановяване.
И накрая, след фокусиране с помощта на увеличен изглед на LCD дисплея, кадърът е направен, след като вибрациите са се уталожили.Средно целият този процес за един изстрел отне 15 секунди.
В обобщение процесът включва първо настройка на височината на статива за предстоящото сканиране на географска ширина, след това за всяка позиция на географската дължина:
Натиснете бутона на мобилния телефон, за да преместите ротатора с 20 градуса
Натиснете бутона за увеличение на LCD дисплея на камерата
Подравнете обекта върху сензора, като използвате хоризонталния плъзгач на макрорелсата
Фокусирайте с помощта на плъзгача за вход/изход върху макро релсата
Изчакайте вибрациите на системата да се уталожат
Направете снимката с дистанционното с кабел
Обработка
Горната и долната половина след процеса на подравняване на камерата са показани по-долу.Поради малката дълбочина на фокусиране, като цяло всичко, което не е върху обекта, е било доста извън фокуса и не са открити точки на характеристиките.Поради това в повечето случаи маскирането не се изисква, спестявайки значително количество човешко време.
Първа страна
Втора страна
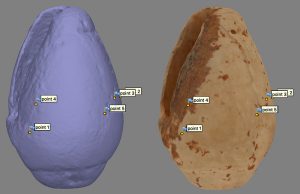
Като цяло нямаше достатъчно припокриване между двете половини за автоматично подравняване и обединяване на базата на точки.Вместо това на всяка половина бяха идентифицирани редица съвпадащи маркери и беше извършено подравняване и обединяване по маркер.Пример, показан по-долу.
Маркери, показани на нетекстурирана мрежа
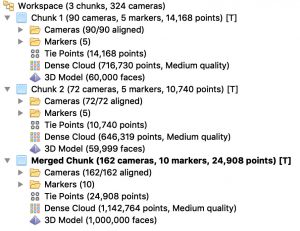
По-долу са показани обединените набори от камери.Като цяло по-добри резултати бяха получени чрез преизчисляване на облака с гъста точка след процеса на сливане.
Обединени комплекти камери
Накрая обединеният модел.
Нетекстуриран и текстуриран краен модел
Типично резюме на проекта може да бъде както следва.
Бележки
Програмно осигуряване за реконструкция имаше голям шанс да се провали, ако бяха направени две снимки от много сходни позиции. За някои обекти беше представено, че човек може да фокусира върху предната повърхност и след това да направи друга снимка от малко по-различна позиция, фокусирайки се върху задната повърхност. Това обикновено би се провалило. Ако е необходим набор от снимки на преден и заден фокус, тогава по-добре променете позицията на камерата, например леко повдигнете или спуснете.
Въпреки че изборът на MetaShape е успешен, има известна неудовлетвореност от привидно недетерминирания характер на моменти по време на фазата на подравняване на снимката. Подравняването понякога се проваляше и се променяше много малко (ако нещо) и тогава щеше да успее. Изборът дали да се изберат всички параметри като „фото-инвариантни“ изглеждаше необходим за някои набори от изображения и въпреки това щеше да се провали при други, въпреки използваната същата камера, обектив и техника.
Изглежда, че калибрирането на лещите не е променило резултатите, наистина резултатите често са по-ниски.
Докато Edelkrone Head One се представяше безупречно, имаше някои досадни ограничения в техния софтуер. Изглежда, че програмно осигуряване „философия“ представя по-малко функции, смисълът е, че е създаден само за начинаещи потребители. Авторът от друга страна предполага, че много малко клиенти за това устройство са начинаещи.
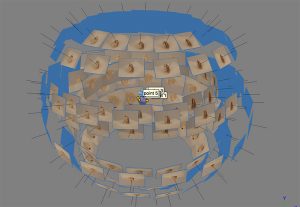
По-долу е доклад за изграждането на платформа за заснемане на снимки с намерението да се използва стандартен софтуер за реконструкция за създаване на 3D човешки модели. Приложението е заснемане на спортисти, а именно плувци, и като такъв не може да се разчита на достатъчно функционални точки по темата. Първоначалният подход беше да се нарисуват обектите по такъв начин, че да се осигурят достатъчно точки на характеристиките. Това предишно упражнение за оценка беше тест както за определяне на най-добрия модел на рисуване, така и за определяне на броя на необходимите камери.
За разлика от 3D възстановяването на неживи обекти, човек не може разумно да стои неподвижен повече от секунда или две. По-традиционната 3D реконструкция с една камера би изисквала поне десет минути, следователно използването на манекен за по-ранното тестване. Тогава решението е да се разположат множество камери, които ще бъдат едновременно задействани. Genlock не се изисква, системата, както е проектирана, задейства камерите до 1/10 секунда, лесно достатъчна, за да избегне всяко движение за обект, на когото е казано да остане възможно най-неподвижен.
Първото изграждане на системата е както следва.
Спецификации на системата
Брой камери
48 (4 х 12 цилиндрични решетки)
Разделителна способност на камерата
24 МПиксели всеки
Лещи
18 мм
Радиус, височина
3,5 м, 3,0 м
Свързаност
Спусък на камерата, глобално затваряне на контакти
USB през 3 х 20 порта USB хъбове
Компютърна ОС
MacPro, Mojave
Тръбопровод за улавяне и обработка
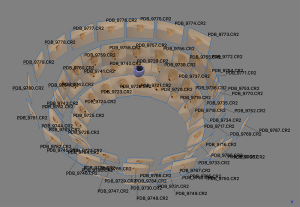
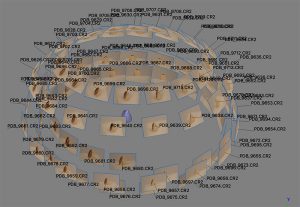
Типичната последователност на заснемане започва с вземане на фотографски набор от подходящо калибриращ обект с богата текстура. Това служи за две цели, първо позволява да се изчисли точно положение и ориентация на камерите, второ създава висококачествени позиции в 3D пространство на повърхността на калибриращия обект.
Вторият фотографски комплект е снимка на пространството без никакви обекти, това се използва за създаване на маски за последващо заснемане с обекта. По-долу е показано последващо улавяне с контур в бяло на маската, образувана чрез просто изваждане на изображението на празното пространство от изображението на предметното пространство. Това очевидно е купол на камера за специфично маскиране на камерата. Забележка: камерите са в портретен режим.
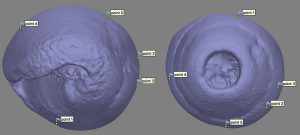
Полученият реконструиран 3D модел като обикновена мрежа и текстурирана мрежа. Показани са и карти за дълбочина за всеки изглед на камерата.
Макар че има още няколко неща, които трябва да се направят, за да се подобри геометричното качество от автоматичните процеси, все още се очаква да има ръчно почистване. В този случай затваряне на стъпалата, премахване на частични стъкла (прозрачното стъкло вероятно няма да се възстанови чрез фотографски процес) и изглаждане на грапави повърхности.
Някои допълнителни тестови субекти от фазата на инсталиране и тестване.
Молекулярната нанотехнология включва способността да се изграждат структури, които са разрешени от физическите закони, с молекулярна точност. Интересувам се предимно от позиционно сглобяване, което е детерминиран процес, при който компонентите, използвани в конструкцията, се държат на известни позиции и са ограничени да следват желаните междинни физически пътища по време на цялата строителна последователност. Програмируемо позиционно сглобяване в молекулярен мащаб е централният механизъм за постигане както на голяма гъвкавост, така и на максимална точност и качество в производството. Ранното предложение за следващата логическа стъпка за научноизследователска и развойна дейност е тук, техническа библиография за изследване на позиционната диамандоидна механосинтеза е достъпна тук, а първият патент, подаван някога за позиционна диамантена механосинтеза, е наличен тук. Другият ключ към практическото молекулярно производство е способността да се произвеждат огромни количества молекулно прецизни структури или да се събират по-големи обекти от огромен брой молекулярно прецизни по-малки обекти – тоест масивно паралелно сглобяване. Крайният резултат от този процес на разработка ще бъде основен молекулярен асемблер, който използва нанотехнологии на фаза на машината (напр. Наномащабни зъбни колела, подпори, пружини, двигатели, кожуси) за производство на молекулярно прецизни диамандоидни структури, следвайки набор от инструкции за изграждане на желана специфична дизайн.
Нашите международни изследователски сътрудничества, водещи в крайна сметка към развитието на работеща нанофабрика, са описани на уебсайта Нанофабрично сътрудничество.
Кинематични самовъзпроизвеждащи се машини (Държавна биология, 2004). Тази книга предлага общ преглед на обемната теоретична и експериментална литература, отнасяща се до физически самовъзпроизвеждащи се системи и самовъзпроизвеждане. Основният фокус тук е върху самовъзпроизвеждащите се машинни системи. Най-важното е, че се занимаваме с кинематични самовъзпроизвеждащи се машини: системи, в които действителните физически обекти, а не просто модели на информация, извършват собствена репликация. След кратък прилив на активност през 50-те и 80-те години, областта на проектирането на кинематични реплициращи системи получи нов интерес през 90-те години с появяващото се признание за осъществимостта на молекулярните нанотехнологии. Полето преживява ренесанс на изследователска дейност от 1999 г., тъй като изследователите осъзнават, че репликиращите системи са достатъчно прости, за да позволят експериментални лабораторни демонстрации на работещи устройства.
Диамантени повърхности и диамантена механосинтеза (2008-09, в подготовка). Пълният анализ на това как да се използва програмируемо позиционно сглобяване за синтезиране на повечето разположения на атоми, разрешени от физическия закон, в момента би бил непосилно сложен. По-управляем проект е да се анализира значителен клас твърди въглеводороди – по-специално диамант -, който потенциално би могъл да бъде синтезиран чрез използването на малък набор от позиционно контролирани механични накрайници на инструменти. Вече има широко разпространен интерес към изключителните свойства на диаманта като изключителна твърдост, висока якост и твърдост, висока топлопроводимост, нисък коефициент на триене, химическа инертност и широка лента. Характеристиките на молекулярната повърхност на диаманта бяха подробно изследвани както теоретично, така и експериментално през 90-те години и много практически въпроси относно молекулярната структура на диамантените повърхности вече са разрешени. Областите на диамантената отлагане на химически пари и адамантановата химия осигуряват допълнително разбиране, както експериментално, така и теоретично, на безбройните механизми на реакция, които могат да допринесат за растежа на диаманта.
Техническа библиография за изследване на позиционната механосинтеза е достъпна тук. Първият патент, подаван някога за позиционна механична синтеза на диаманти, е достъпен тук. Вижте също уебсайта за Нанофабрично сътрудничество за по-широкия контекст на това изследване.
Основи на наномеханичното инженерство (2009-10, в подготовка). Този учебник за курсове, предназначен за използване от студенти от 2-ра или 3-та година в усъвършенствани инженерни програми, ще осигури солидна основа в практичния дизайн на машини с молекулярни мащаби, съставени от твърди ковалентни твърди частици, със силен акцент върху диаманти и диамантоидни материали След въведение в уникалните аспекти на наномащабните машини и преглед на изчислителните инструменти, които понастоящем са на разположение за подпомагане на такива проекти, механичните характеристики на ключовите материали и основите на натоварването, напрежението, твърдостта и механичните дефекти в наномащабните машини ще бъдат изследвани в детайл. Това ще бъде последвано от дискусии и примери за специфични наномеханични компоненти и съставни машини, включително лагери, крепежни елементи, зъбни колела, връзки, задвижващи механизми, двигатели и помпи, механични енергийни контролери, сензори и програмируеми материали.
Уебсайт на Молекулярен асемблер, последно актуализиран на 5 август 2020 г.
Хората често реагират на музиката, като запазват времето, потупват в такт или се люлеят на пулса. В основата на такива обикновени движения е акт на познание, който не е лесно възпроизведен в компютърна програма или автоматизиран от машина. Първите няколко глави от „Ритъм и трансформации“ задават – и отговарят – на въпроса: Как можем да изградим устройство, което може да „потупа крака“ заедно с музиката?
Втората половина на „Ритъм и трансформации“ описва въздействието на такава „машина за намиране на ритми“ върху теорията на музиката и върху дизайна на електрониката за обработка на звука като музикални синтезатори, барабанни машини и устройства със специални ефекти. Бийт търсачът предоставя конкретна основа за дискусия на връзката между когнитивната обработка на временната информация и математическите техники, използвани за описване и разбиране на закономерностите в данните. Книгата също така представя техники за обработка на сигнали, базирани на ритъм, методи за музикална рекомпозиция и нови видове музикологичен анализ.
Съществува коментирано съдържание, както и пълната първа глава в удобен за браузъра формат. Или отидете директно на кратко описание на всяка от главите:
На всеки етап многобройни звукови примери (общо над 400 минути) предоставят конкретни доказателства, че дискусията остава основана на възприеманата реалност. Преминете напред към тийзърите за преглед на видовете звукови манипулации, които „Ритъм и трансформации“ позволява.
Или може би бихте предпочели бърз преглед на звуковите примери в момента в мрежата? Опитайте тези. По-пълните списъци са по глави, макар че само малък процент от съдържанието на компактдиска Ритъм и трансформации диск побира тук на уебсайта
Добре дошли в лабораторията по роботика в Държавен университет в Айова! Ние сме енергична група, която изследва основни проблеми в роботиката с усилия, балансирани между теоретични изследвания и експериментални демонстрации.
Нашите текущи изследвания имат два тласъка. Първият е да се разработи роботизирана система, специализирана за нарязване, нарязване или нарязване на деформируеми предмети като плодове, зеленчуци и меса. Проучваме моделиране на деформация на обекта и контактна сила при рязане и разработваме стратегии за основни маневри като взимане и стабилизиране на обекти и взимане и контрол на движението с кухненски нож. Целта е да се разбере в дълбочина за манипулирането на деликатни, гъвкави и хлъзгави предмети, боравене с инструменти с умения, координация между роботизирани ръце и ръце, както и планиране и контрол на движението въз основа на мултимодално засичане и деформируемо моделиране.
Вторият тласък е фокусиран върху физическия феномен на удара и използването му при роботизирани манипулации. Импулсивни сили могат да се използват за изпълнение на задачи, които иначе биха били доста трудни. Примерите включват чукване на пирон, напукване на яйце, отваряне на заседнал прозорец, удряне на тенис топка и др. Ние изучаваме или сме изучавали следните подпроблеми: а) ефективно изчислително моделиране на едновременния сблъсък на множество твърди тела; б) разработване на интерактивен графичен симулатор с отворен код за сблъсък, както за изследователски, така и за образователни цели; в) планиране на въздействие в задача, за да се получи някакво желано движение след въздействие на обект; и г) синтез на план за манипулация за комбиниране на импулсивни действия с динамични движения, за да се демонстрират умения, които все още не са постигнати от роботи.
Други изследователски теми и интереси включват:
Сръчна манипулация
Оценка на движението въз основа на зрение
Хващане на деформируеми предмети
Деформируемо моделиране
Планиране на пътя
Тактилно разпознаване и реконструкция на формата
Локализация и засичане на роботи
Геометрични алгоритми за криви и повърхности
Нелинеен контрол и наблюдение
Кинематика и динамика на манипулацията
Ако някоя от горните теми ви интересува, заповядайте да се присъедините към нас и да направите някои вълнуващи изследвания на роботиката.
Всички мнения, констатации и заключения или препоръки, изразени в този материал, са на автора(ите) и не отразяват непременно възгледите на Националната научна фондация.
По-долу са обобщени разликите и относителните достойнства между лазерното сканиране и 3D реконструкцията от снимки в контекста на запис в археологията. Предвижда се да бъде неформална дискусия, насочена към често задаван въпрос, а именно: „Трябва ли да използвам лазерен скенер или да използвам 3D реконструкция (често наричана фотограметрични техники), за да заснема 3D модел на X“? Относителните достойнства ще бъдат илюстрирани с пример, който използва както лазерно сканиране, така и 3D реконструкция, за да заснеме модел на скален заслон, използван от местни австралийци. Прави се опит да се обхванат всички възможни съображения, за да се помогне на всеки, който обмисля коя от тези цифрови технологии за запис да използва.
Трябва да се отбележи, че авторът е практикуващ подхода за 3D реконструкция. Но ще бъдат положени усилия да се представи справедливо сравнението, като се отбележи отново, че то се основава на действителен запис на един и същ сайт с двете технологии, тъй като може да се направи такова пряко сравнение. Също така се отбелязва, че както при всеки доклад, сравняващ технологиите, той може да остарее, когато станат достъпни по-нови продукти и алгоритми.
Сайтът
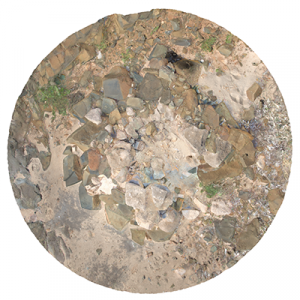
Скалния заслон се намира в регион, известен като Западен Анджелис в Западна Австралия. Дължината му е приблизително 50 метра, дълбочина 20 метра и височина между 1,6 и 3 метра. Интерактивна панорама 360×180 на сайта може да се види по-долу.
Образ 1: Интерактивен фотографски балон от скалния заслон.
Хардуерът
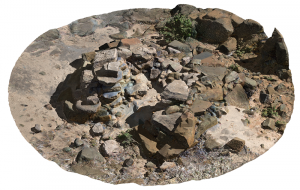
Използваният лазерен скенер беше Leica C10 (зелена светлина, 532нм). За да се сведат до минимум зоните на запушване поради силно извитата природа на скалния заслон, бяха получени 6 сканирания, всеки от различно място. Позицията на референтните маркери бяха геореферирани с кинематично GPS наблюдение. Последващата обработка беше извършена със софтуера Leica Cyclone. Сканирането доведе до малко под 110 милиона точки с около 80 милиона от самия заслон и близките околности.
Образ 2: Изобразяване на облака от точки от лазерното сканиране, 80 милиона точки около заслона
Фотографията за 3D реконструкция е Canon 5D Mk III, 20 + Mпиксел пълнокадрова камера и 28-милиметров обектив. Софтуерът за извършване на реконструкцията се състои от търговски пакет, наречен PhotoScan, както и тръбопровод, разработен от автора. Докато едното или другото от тези две софтуерни решения може да се представи по-добре от другото при някои обстоятелства, за този модел резултатите бяха до голяма степен еднакви. Поради извитата природа на пещерата са направени почти 2000 снимки. Ss според нормата за този процес, всяка снимка се прави от различна позиция. Изборът за реконструкцията беше мрежа от 2 милиона триъгълника, това беше, за да може удобно да се използва в рамките на навигацията в реално време. За архивни цели е създадена 5 милионна триъгълна мрежа. И в двата случая текстурите са създадени като четири 4K изображения.
Образ 3: Обработка от текстурирана мрежа, възникнала при реконструкцията
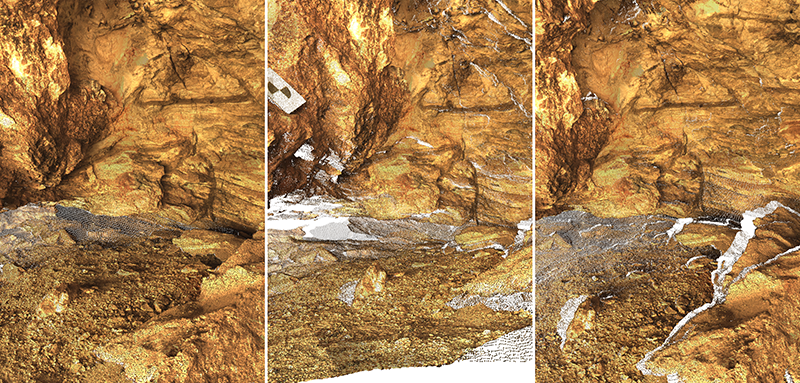
Точност
Малък е въпросът, че лазерните скенери са по-точни. В зависимост от модела те са надеждно оценени с известна максимална грешка. В зависимост от точния скенер и конфигурацията той може да бъде в диапазона mm или дори по-малък. Когато се обсъжда точността в този контекст, това се отнася само за части от модела, видими от лазерния скенер, как се оценява безкрайно неточния характер на части от модела, които не се виждат. За силно сгънати обекти като примера, използван тук, се изисква потенциално голям брой места за лазерни станции. Въпреки че в този пример са използвани 6 места, има много зони на запушване. По-долу е показан изглед на точков облак от позицията на един от лазерните скенери (вляво), средното и дясното изображение са изгледи от различни позиции, показващи части от модела, които не се виждат от нито една от лазерните позиции.
Образ 4: Илюстрация на зоните на оклузия (средна и дясна) при гледане от позиции, които не се виждат от никое положение на лазерна станция.
3D реконструкцията, извършена оптимално, има различно местоположение на камерата за всяка снимка, което води до много по-малко области на оклузия. Въпреки това при реконструирани 3D модели грешката е по-променлива, по-зависима от размера на обекта и броя на направените снимки и уменията на фотографа (вижте по-късно). 3D реконструкцията може да доведе до грешки в глобален мащаб и изкривяване, тоест изкривяване в мащаба на целия обект. Такива проблеми с мащаба и изкривяването могат да бъдат решени с по-строги техники, включително геолокационни референтни маркери или известни размерени дължини. Това не беше извършено тук поради негативното въздействие върху други желани характеристики на 3D реконструкцията, а именно скоростта на улавяне и ограниченията на оборудването.
Качество на текстурата
Качеството на текстурата на реконструираните 3D повърхности се приема за по-добро от лазерните скенери. При първия това зависи от разделителната способност на камерата и размера на сниманите петна. Качеството на текстурите също зависи от уменията на фотографа, докато при лазерно сканиране то е по-последователно. Могат да възникнат грешки в текстурата на получената мрежа, като те обикновено се въвеждат от етапа на повторна проекция на алгоритъма, където снимките от камерите и необходимостта от смесване на избраните части от снимките в 3D мрежата. Това е подобно на грешките, възникващи от деформация и смесване при панорамна фотография.
За лазерно сканиране цветната разделителна способност е на точка. Като цяло камерата за лазерен скенер е изместена от сканиращия лъч, така че могат да възникнат грешки поради паралакс.
Условия на осветление
Сравняването на представянето на двете техники при различни условия на осветление е по-трудно и зависи от използвания лазерен скенер. За тъмни черни пространства лазерният скенер ще работи с по-малко проблеми, докато снимките биха били проблематични, особено ако ръката, която авторът поддържа, е важна за времето, необходимо за заснемане. За сравнение лазерните скенери обикновено имат повече проблеми със силно осветени пространства, като пряка слънчева светлина, докато фотографията се възползва от това, като използва малки отвори и подобрена дълбочина на фокусиране.
И в двата случая вариациите в осветлението влияят на цвета на крайния резултат, това обикновено е по-ясно изразено в случай на 3D реконструкция.
Отразяващи или тъмни материали
И двете техники страдат от определени видове материали. 3D възстановяването е неуспешно с отразяващи повърхности, тъй като етапът на точката на обекта ще идентифицира характеристики в отраженията, като резултатът е неправилно изчисление на дълбочината. Това е двойно проблематично за извити отразяващи повърхности, където дълбочините на точките на характеристиките се различават. Лазерното сканиране също страда от отразяващи повърхности, но проблеми ще възникнат по-рано при 3D реконструкция. И двете техники могат да имат проблеми с много тъмни (поглъщащи светлина) повърхности, лазерният скенер да не получава обратен сигнал и в случай на 3D реконструкции не могат да бъдат открити точки от характеристики между снимките.
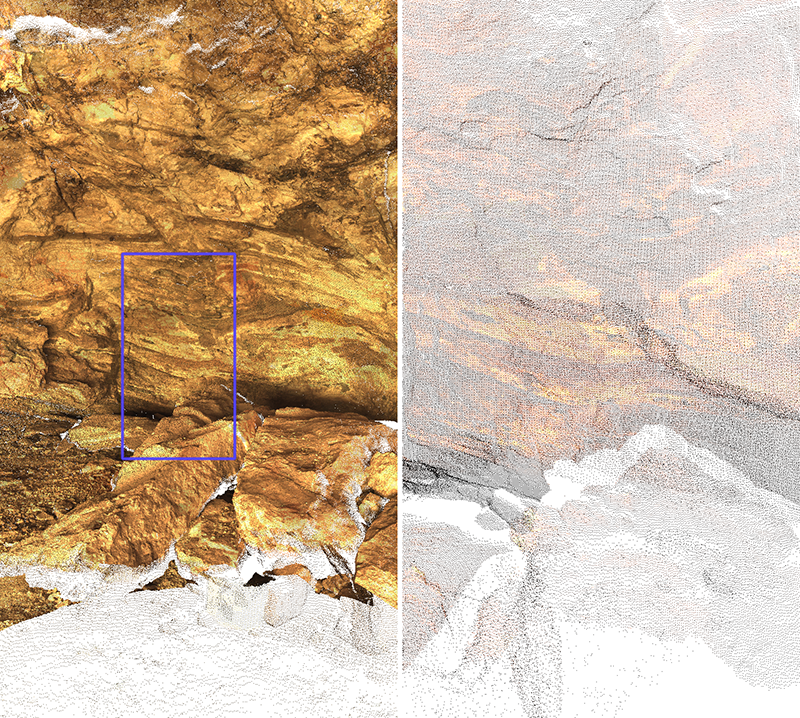
Облак от точки или повърхностна мрежа
Ключова разлика между двете техники е типът данни, които те предоставят. В единия случай облак от цветни точки (x, y, z, r, g, b), в другия – текстурирана мрежеста повърхност. Докато облакът от точки от лазерно сканиране все още може да се преобразува в мрежа, проблемът е по-труден от извеждането на мрежа по време на процеса на 3D възстановяване поради наличната по-малко информация. Структурата на мрежата също би била по-ниска поради естеството на информацията за цвета за всяка точка.
Има редица приложения, за които текстурирана повърхностна мрежа е по-полезна или дори необходима. Те включват използването на 3D модела в конвейери за 3D рендиране или като интерактивна среда за виртуална реалност. Не само, че текстурираните мрежи се поддържат по-лесно, но и имат предимството да не стават „по-тънки“ с приближаването. Цветните облаци на точки могат да изглеждат твърди, когато са достатъчно далеч в сравнение с разделителната способност на екрана. Или когато са подходящо плътни, но това повдига въпроса за обема на данните и колко ефективно е представена повърхността. Например, 110 милиона точки тук обикновено не биха се считали за особено плътно лазерно сканиране, но интерактивната навигация в такъв облак от точки е значително по-голямо графично натоварване от 2 милиона триъгълна мрежа, като по-късно има значително по-голяма визуална привлекателност.
Образ 5: Илюстрация на изтъняване на точки при приближаване или мащабиране на облак от точки.
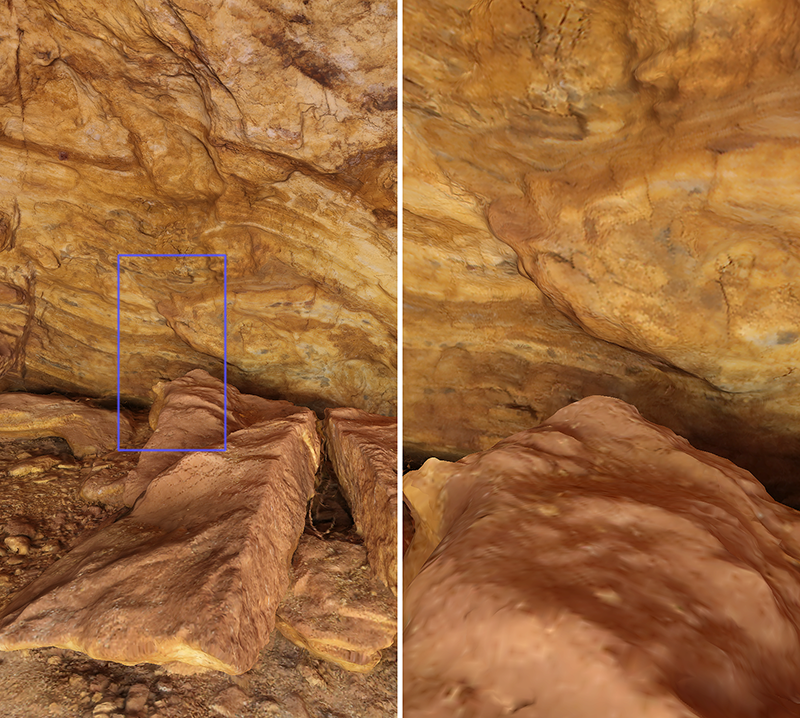
Мащабирането на текстурирана мрежа от 3D реконструкция води до обичайния размит вид на изображението, който се появява при мащабиране на всяко изображение, когато пикселът на изображението започне да обхваща повече от един дисплей.
Образ 6: Мащабирането на повърхностна мрежа води само до размазване на текстурата
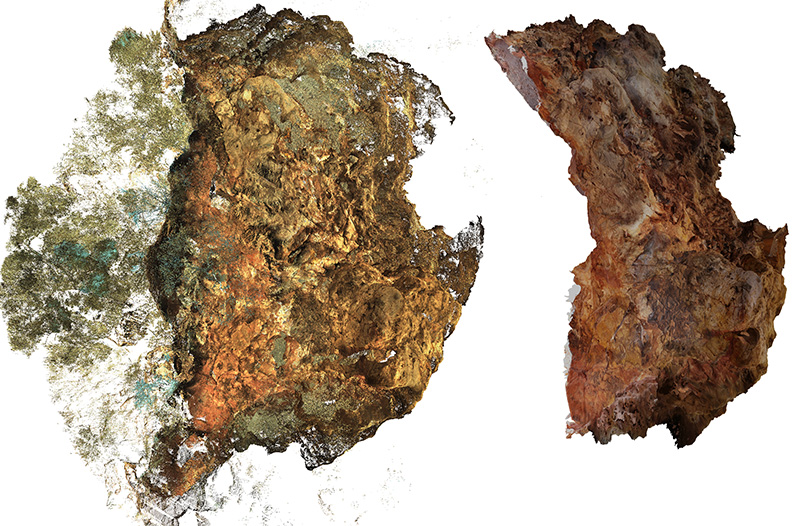
Покритие
Предимство на лазерните сканирания е, че те обикновено заснемат повече от сцената, отколкото е необходимо. Снимката за 3D реконструкция е по-насочена към въпросната материя. В примера тук и показан по-долу са записани дървета и по-широка площ пред заслона. Въпреки че дърветата не са истински 3D обекти, те обаче представляват част от контекста на сайта. Имайте предвид, че на фигурата под облака на точките е изрязан, са записани някои дори по-отдалечени обекти.
Образ 7: По-широко улавяне на околната среда с лазерно сканиране (вляво) в сравнение с реконструкция (вдясно)
Изолирани оклудери
И двете технологии се борят да се справят на преден план, изолирани оклудери, в случая казват ствол на дърво във входа на заслоните. Лазерното сканиране ще изисква редица позиции на лазерно сканиране около оклудера, за да улови формата от всички страни. За 3D реконструкция ограничението е свързано повече с алгоритмите и способността им да създават функционални точки, свързващи оклудера с останалата част от сцената.
Разходи за оборудване
Един добър огледално-рефлексен фотоапарат и първокласен обектив, подходящи за 3D възстановяване, струват значително по-малко от лазерния скенер.
Време за изпълнение
В примера тук, за да се постигне покритие на извитата форма на скалния заслон, бяха извършени 6 сканирания от позиции, насочени към минимизиране на слепите петна. Снимката отне по-малко от 30 минути, всяка позиция на лазерно сканиране отне около 1 час след включване на времето за настройка и калибриране. Накратко, 30 минути в сравнение с ден.
Времената за последваща обработка са сравними между двете техники, и двете могат да бъдат значителни.
Оборудване
Тежестта на лазерните скенери и свързания с тях хардуер (тежки стативи, батерии) за дистанционно разполагане, особено в неравен терен, може да бъде доста предизвикателна. 3D реконструкцията изисква само една огледално-рефлексна камера и скромен обектив или две. Статовете за фотография за 3D реконструкция се използват рядко, с изключение на условия със светлина и не са необходими в този пример, въпреки че обектът има силно изменение на осветлението от пряка слънчева светлина до сянка в заслона.
Инвазивност
И двете техники се считат за неинвазивни. И двамата изискват човешки оператор в космоса, лазерното сканиране допълнително изисква статив. Възможно е да има случаи, когато лазерният лъч може да повреди улавяната повърхност, но това е рядко и със сигурност не е съображение в примера тук. Има съображение за безопасността на лазерния лъч с хора в непосредствена близост. Също така за 3D реконструкции човек не иска хората да се движат в пространството. И двете техники могат да се справят с определена степен на движение в околната среда, при условие, че тя не е нито в текущата посока на сканиране, нито в зоната, която се снима в момента.
Експертиза на оператора
Лазерният скенер обикновено се извършва от някой, който е завършил курс по правилната операция. За разлика от това, непринудеността и липсата на специализиран хардуер, с който може да се опита 3D реконструкция, означава, че често фотографията не се извършва оптимално. Има много малко курсове, в които човек изучава техниките, и подобно на други области на фотографията има включено умение, което се придобива чрез практика. Например два фотографски придобити модела от различни оператори ще покажат много повече вариации в качеството от модела, придобити от два различни оператора на лазерно сканиране. Неспециализираният аспект на 3D реконструкцията може да се счита за предимство, но едно от последствията е, че често се използва лоша фотографска техника. Това не само води до неоптимални 3D модели, но може и да пристрасти сравнението с лазерното сканиране.
Обобщение
Оставяйки настрана среди или повърхности, където едната или другата технология на заснемане може да се провали, 3D реконструкцията, базирана на фотография, има много предимства. Според авторите решаващият фактор е предназначението на 3D модела. Ако намерението е 3D модел за преживявания в реално време или даващ представа за мястото или обекта, тогава текстурираните мрежи са значително по-добри. Ако целта е представяне на качеството на изследването с възможност за извършване на измервания в рамките на известна толерантност на грешки, тогава лазерното сканиране е ясният избор. Алтернативата, разбира се, е да се внедрят и двете техники, както се е случило за записването на скалните заслони, една от които е представена като пример.
Новите настройки вдъхновяват нови музикални мисли. Алтернативните настройки ви позволяват да свирите на гласове и да плъзгате между формите на акорди, което обикновено би било невъзможно. Те дават достъп до нестандартни отворени низове. Възпроизвеждането на познати пръсти на непознат гриф е вълнуващо – никога не знаете какво точно да очаквате. А разработването на познати рифове на непознат гриф често предполага нови звукови модели и вариации. Това ръководство ви помага да проучите алтернативни начини за правене на музика. И сега има интерактивна версия на ръководството за алтернативна настройка.
Ако се чудите защо може да искате да играете в алтернативни настройки, щракнете тук.
Ръководството заалтернативна настройка ви показва как да пъхнете китарата си във всички популярни алтернативни настройки, показва как да отваряте пръсти и акорди, как да свирите на представителни скали и графично показва нотите, както се появяват на грифа. Силните страни и ограниченията на всяка настройка са обсъдени, като ви помагат да извлечете максимума от музикалните си изследвания. Ръководството за алтернативна настройка е разделено на четири основни раздела, съответстващи на четирите основни типа алтернативни настройки: отворен, инструментален, редовен и „специален“.
Разгледайте тези алтернативни музикални вселени с приятелски акорд и мащабни класации на Ръководството заалтернативна настройка. Какво чакате… пренастройте тази китара сега.
Кръгът от бележки
Транспониране на акорди
Пример в отворете G
Комбиниране на акорди
Използване на октави
Четирите трика
Акорди за неща са направени от
Как да изграждаме акорди и гами
Ами други настройки?
Таблица на интервалите на акордите
Кръстосан индекс на настройките
Таблица на скалните интервали
Азбучен списък чрез настройка
В отворените настройки шестте струни са настроени, за да образуват прост акорд. Това улеснява възпроизвеждането на необичайни акордови комбинации и интересни тонални клъстери чрез използване на “дрон” и “устойчиви” струни. Плъзгачът на тесно гърло и хармониците са прекрасни при отворени настройки, защото можете да свирите цели шест струнни акорда. И можете да свирите на акорди на бара само с един пръст!
Инструменталните настройки се основават на настройките на съвременни и исторически инструменти като мандолина (увеличена за шест струнни пиеси), харанго, литра, уд и много други. Играчите на тези инструменти могат да намерят настройките и акордовите класации за полезни, но китаристите ще намерят някои наистина прекрасни „алтернативни“ начини за настройка.
При редовните настройки струните са настроени равномерно нагоре по грифа. Това позволява хордовите форми да се преместват нагоре и надолу по грифа като обикновен хордов хор, а също и настрани през грифа. Научете шепа форми на акорд в редовна настройка и ще знаете стотици акорди! Оле Киркеби е много ентусиазиран от основната трета настройка и джаз уеб страницата на Ралф Пат има страхотна колекция от тунинг класации за нея.
Специалните настройки са различна колекция от настройки, повечето от които са създадени и/или популяризирани през последните години от различни певци и текстописци



















 „потупа крака“ заедно с музиката?
„потупа крака“ заедно с музиката? Втората половина на „Ритъм и трансформации“ описва въздействието на такава „машина за намиране на ритми“ върху теорията на музиката и върху дизайна на електрониката за обработка на звука като музикални синтезатори, барабанни машини и устройства със специални ефекти. Бийт търсачът предоставя конкретна основа за дискусия на връзката между когнитивната обработка на временната информация и математическите техники, използвани за описване и разбиране на закономерностите в данните. Книгата също така представя техники за обработка на сигнали, базирани на ритъм, методи за музикална рекомпозиция и нови видове музикологичен анализ.
Втората половина на „Ритъм и трансформации“ описва въздействието на такава „машина за намиране на ритми“ върху теорията на музиката и върху дизайна на електрониката за обработка на звука като музикални синтезатори, барабанни машини и устройства със специални ефекти. Бийт търсачът предоставя конкретна основа за дискусия на връзката между когнитивната обработка на временната информация и математическите техники, използвани за описване и разбиране на закономерностите в данните. Книгата също така представя техники за обработка на сигнали, базирани на ритъм, методи за музикална рекомпозиция и нови видове музикологичен анализ.







 Всички мнения, констатации и заключения или препоръки, изразени в този материал, са на автора(ите) и не отразяват непременно възгледите на Националната научна фондация.
Всички мнения, констатации и заключения или препоръки, изразени в този материал, са на автора(ите) и не отразяват непременно възгледите на Националната научна фондация.